在当今的创新领域中,人工智能(AI)和机器人技术正在彻底改变各个行业
Weeemake AI 分拣机器人作为一款教育工具,简化了 AI 与机器人技术的整合。本指南将重点介绍如何配置颜色识别功能,这是增强机器人功能并为 AI 项目打开新大门的关键方面。通过这一过程,用户可以教会机器人基于颜色识别和分拣物体,这是自动化和智能系统中的一项基本技能。
关键步骤
- 打开 WeeeCode 软件。
- 将 ELF AIOT K210 控制器连接到软件。
- 打开 AI 分拣或颜色识别项目的示例代码。
- 切换到代码模式并选择“使用 IDE 打开”。
- 连接并运行程序以查看图像流。
- 准备用于识别的颜色块。
- 调整 LAB 色彩空间值以实现准确的颜色识别。
为您的 Weeemake AI 分拣机器人设置颜色识别
打开 WeeeCode:AI 冒险的第一步
掌握颜色识别的旅程从打开 WeeeCode 开始,这是为您的 Weeemake AI 分拣机器人提供的编程环境。该软件提供了一个用户友好的界面,您可以在此创建和修改控制机器人操作的程序。
WeeCode 打开后,是时候在您的计算机与机器人的智能核心之间建立连接了。
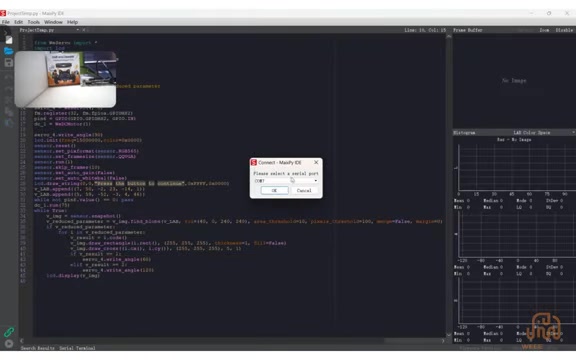
连接 ELF AIOT K210 控制器:建立通信
ELF AIOT K210 控制器作为机器人的大脑,负责解释代码并将其转化为行动。通过 USB 将控制器连接到您的计算机。确保检查串行端口,确认连接稳定。串行端口通常由一个小数字标识(例如 COM7 或 COM8)。成功连接后,代码和指令的传输将为颜色识别这一激动人心的任务奠定基础。
接下来,您需要选择专为 AI 分拣或颜色识别设计的示例代码。这些预先存在的代码为自定义颜色检测提供了框架。
打开示例代码:颜色识别的基础
示例代码作为教育资源。打开 AI 分拣或其他与颜色识别相关的项目示例代码。
该代码通常包括相机初始化、图像处理和电机控制所需的所有配置,使设置过程更加轻松快捷。提供的示例代码使您能够深入研究 LAB 色彩空间值,这是实现准确颜色检测的基础。
理解 LAB 色彩空间:准确颜色检测的秘诀
LAB 色彩空间是一种基于非线性压缩 CIE XYZ 色彩空间坐标的颜色对立空间,其中 L 表示亮度,a 和 b 表示颜色对立维度。相机捕获的图像由机器人使用这些 LAB 值进行处理。为了实现可靠的颜色识别,您必须调整这些 LAB 色彩空间值,以准确匹配机器人需要识别的颜色。下一步是使用集成开发环境(IDE)优化代码以实现颜色识别。
使用 IDE 打开代码模式:深入程序
为了微调颜色识别参数,切换到代码模式并选择“使用 IDE 打开”。如果这是您第一次使用,可能需要下载并安装 IDE。此操作将可视化模块转换为代码行,提供对程序更细粒度方面的访问。
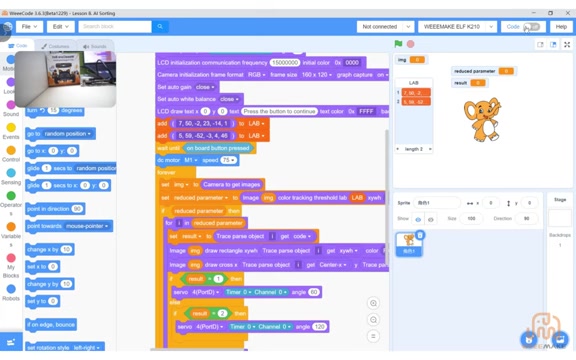
使用 IDE 打开后,您可以访问修改颜色检测算法和优化机器人性能的框架。现在,您已准备好连接并运行程序,开始接收机器人相机的图像数据。
连接并运行程序:可视化图像流
连接并运行程序以获取图像。
这将启动 Weeemake AI 分拣机器人相机的实时图像流。通过运行程序,您可以可视化机器人“看到”的内容,从而实时调整 LAB 色彩空间值。准备目标颜色块对于教会机器人准确识别特定颜色至关重要。
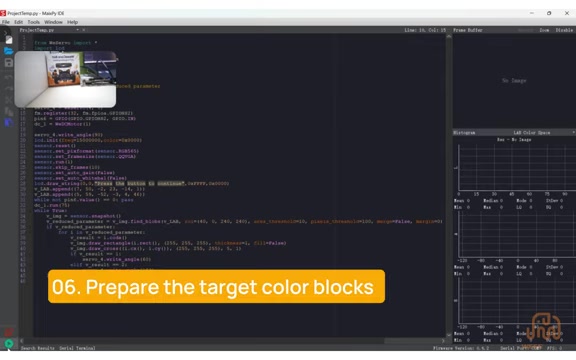
准备目标颜色块:为识别设置舞台
要启动颜色识别过程,请准备目标颜色块。这些块对于校准机器人的颜色传感器并确保其能够高精度地区分不同颜色至关重要。
一旦您有了这些颜色块,就可以开始选择颜色区域的过程。
选择颜色区域并设置阈值:定义识别参数
现在是定义识别参数的关键步骤。选择要识别的颜色区域,检查 LAB 色彩空间的最小和最大值,然后设置阈值。
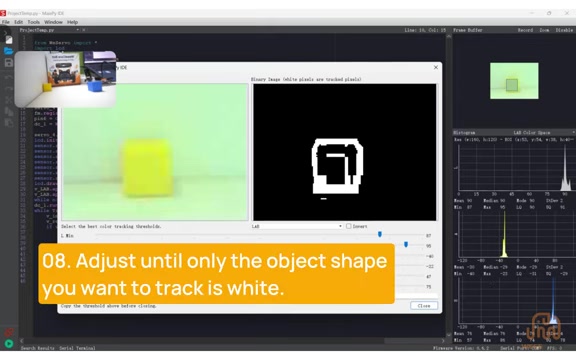
仔细选择图像帧中与您希望机器人识别的颜色相对应的区域。调整 LAB 色彩空间值,直到只有您想要跟踪的物体形状为白色。您可以使用专门的阈值调整软件进一步优化这些阈值,以过滤掉噪声。
调整 LAB 色彩空间值:实现精确识别
现在是定义识别参数的关键步骤。选择要识别的颜色区域,检查 LAB 色彩空间的最小和最大值,然后设置阈值。
这些值决定了机器人将识别为匹配的可接受颜色范围。如果颜色阈值太窄,机器人可能会错过真正的匹配。如果阈值太宽,可能会误识别颜色。一旦您对更改满意,请记下新值以在代码中使用。现在,返回 WeeeCode 进行更改并应用新的 LAB 参数。
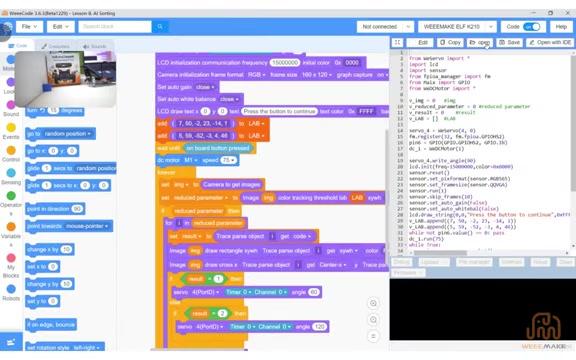
返回 WeeeCode 并应用 LAB 值:完成设置
返回 WeeeCode。粘贴我们刚刚获得的 LAB 色彩空间值。在此处,将调整后的 LAB 色彩空间值仔细粘贴到代码的指定部分。接下来是在线调试的关键步骤,以验证颜色识别的准确性。
在线调试:验证识别准确性
在线调试对于验证机器人颜色识别的准确性至关重要。在 AI 机器人连接的情况下,当您向机器人展示颜色块时,监控屏幕上显示的颜色标签。如果机器人误识别颜色,请返回代码并重新调整 LAB 色彩空间值。如果颜色标签打印正确,机器人现在能够准确识别不同的物体。作为补充,请查看 AI 工厂机器人套件教程的第 6 课以获取更多详细信息。
颜色识别对 AI 分拣机器人的好处
提高分拣准确性
颜色识别显著提高了分拣任务的准确性。通过使机器人能够基于颜色区分物品,制造商可以更可靠地自动化流程。这种精度在食品加工和制药等行业中尤为重要,因为这些行业中的错误可能带来严重后果。
提高操作效率
颜色识别功能的集成简化了操作流程。分拣机器人可以更快、更高效地处理材料,减少人工操作和劳动力成本。这些系统的速度和一致性有助于提高吞吐量和优化生产计划。
跨行业的多样化应用
颜色识别是一种适用于众多行业的多样化工具。在回收领域,它可以区分不同类型的塑料,从而实现高效分拣。在农业中,它可以识别成熟的农产品进行收割。其适应性使其成为任何旨在自动化和增强其流程的行业的宝贵资产。
颜色识别设置的分步指南
步骤 1:打开 WeeeCode
启动 WeeeCode,确保应用程序完全加载并准备好进行项目设置。
步骤 2:连接 ELF AIOT K210 控制器
通过 USB 连接控制器。通过检查指定的串行端口(例如 COM7 或 COM8)验证连接。
步骤 3:打开 AI 分拣示例代码
浏览 AI 分拣示例代码并在 WeeeCode 环境中打开它。这为颜色识别自定义提供了基础。
步骤 4:进入代码模式并使用 IDE 打开
从可视化模块界面切换到代码模式,并选择“使用 IDE 打开”以优化颜色识别参数。
步骤 5:连接并运行程序
建立通信,运行程序以启动实时图像流进行校准。
步骤 6:准备颜色块
准备好用于分拣的颜色块,这些块将作为标准。
步骤 7:选择并调整 LAB 色彩空间
使用 IDE 选择图像区域并优化 LAB 色彩空间阈值,确保图像清晰且无噪声。
步骤 8:在 WeeeCode 中输入值并测试
复制 LAB 值,运行在线测试以观察颜色标签输出进行验证。
Weeemake AI 分拣机器人定价
AI 分拣机器人设置的成本考虑
Weeemake AI 分拣机器人作为一个套件提供,包括组装和初始项目所需的硬件。基础套件的价格大约在 200 至 300 美元之间,具体价格根据零售商和捆绑优惠略有不同。该套件包括 K210 AI 芯片、伺服电机、底盘和必要的传感器等基本组件。其他费用可能包括软件许可和其他用于扩展机器人功能的配件。
对于需要扩展功能的用户,高级套件的价格在 400 至 600 美元之间。这些套件通常包括更高分辨率的相机、增强的传感器和扩展的软件功能,适用于更复杂的项目和应用。以下表格总结了购买和维护 Weeemake AI 分拣机器人所涉及的成本。
初始投资
- 基础套件:200-300 美元,包括带有底盘、K210 AI 芯片和相关机器人组件的机器人。
- 高级套件:400-600 美元,包括升级的机器人,配备更好的组件和扩展的软件功能。
经常性成本
- 软件许可费用:可能在 50-100 美元之间。
- 维护和修理:根据磨损和使用强度而有所不同。
Weeemake AI 分拣机器人的优缺点
优点
- 用户友好界面:WeeeCode 的可视化编程使其适合初学者。
- 多样化应用:适用于从教育到工业自动化的广泛项目。
- 可扩展功能:模块化设计允许轻松集成额外的传感器和功能。
缺点
- 初始成本:前期投资可能对某些用户构成障碍。
- 技术专长:高级项目可能需要更深入的编程和 AI 概念理解。
- 维护:需要定期维护以确保最佳性能。
Weeemake AI 分拣机器人的关键功能
探索 Weeemake AI 分拣机器人的功能
Weeemake AI 分拣机器人设计了一系列功能,使其成为教育和工业应用的强大且多功能的工具。它拥有友好且强大的用户界面,适合从编程新手到经验丰富的用户。其核心功能包括:
- 可视化编程界面。
- 实时操作能力。
- 支持多种编程语言。
主要功能
- AI 驱动的分拣:K210 AI 芯片实现高效分拣,能够快速执行任务。
- 视觉识别:可编程以识别多个属性,提供更多分拣选项。
- 模块化设计:易于设置、修改和维护。
- 开源软件:可与许多开源应用程序和不同编程语言一起使用。
AI 分拣机器人的应用场景
AI 分拣机器人在现代行业中的应用
AI 分拣机器人通过其自动化和增强分拣流程的能力,正在改变众多行业。这些功能适用于需要高精度的场景。这些功能在以下领域非常有用:
- 回收设施:用于分拣可回收物品,AI 机器人为公司节省时间和金钱。随着时间的推移,系统会学会不选择什么以及选择什么。
- 制造工厂:可用于分拣产品,减少工厂工人的时间浪费并提高吞吐量。
- 物流和仓储:可用于根据尺寸、地址和交货日期识别和组织包裹。
常见问题
编程 Weeemake AI 分拣机器人需要什么软件?
Weeemake AI 分拣机器人使用基于 Scratch 的可视化编程环境 WeeeCode,适合初学者。它还支持通过集成 IDE 进行更高级的编程。
什么是 ELF AIOT K210 控制器?
ELF AIOT K210 控制器作为 Weeemake AI 分拣机器人的中央处理单元,负责解释代码并管理机器人的操作。
什么是 LAB 色彩空间值?
LAB 色彩空间值是定义颜色的数值参数,基于亮度(L)、绿-红(A)和蓝-黄(B)分量,使机器人能够准确识别不同颜色。
为什么在线调试很重要?
在线调试允许您实时验证和调整机器人的颜色识别设置,确保准确可靠的颜色检测。
相关问题
初学者可以使用该机器人探索哪些 AI 项目?
初学者可以从基本的颜色分拣、物体识别和线路跟踪项目开始。随着他们的进步,他们可以处理更复杂的任务,如模式识别和自主导航。这些项目有助于建立 AI 和机器人技术的坚实基础。
如何通过额外传感器扩展机器人的功能?
您可以添加超声波传感器进行距离测量、红外传感器进行物体检测以及环境传感器进行温度和湿度读数。这些附加功能增强了机器人与环境交互并执行更广泛任务的能力。
Weeemake AI 分拣机器人支持哪些编程语言?
Weeemake AI 分拣机器人主要通过 WeeeCode 支持可视化编程,但也支持更高级的语言,如 Python 和 C++,为不同技能水平的用户提供灵活性。
相关文章
